|
Property
|
Description
|
|
Class
|
- <DRM Time Related Geometry>
|
|
Superclass
|
|
|
Subclass
|
|
|
Definition
|
An instance of this DRM class is an aggregation of
<DRM Geometry Hierarchy> instances, in which
each branch is a representation of the same environmental entity at
a different point in time, as indicated by the corresponding
<DRM Time Constraints Data> instance.
The time_data_type
field specifies the subclass of
<DRM Base Time Data> of which
each <DRM Time Constraints Data>
link object in the given organization is to be composed.
|
|
Clarifications
|
1
An association between a
<DRM Feature Representation>
instance and a
<DRM Geometry Hierarchy> instance
indicates that the environmental object(s) that they
represent have the semantic relationship indicated by
the <DRM Base Association Data>
instance on the association relationship.
2
An association between two
<DRM Geometry Hierarchy> instances
indicates that the environmental object(s) that they
represent have the semantic relationship indicated by
the <DRM Base Association Data>
instance on the association relationship.
3
An association between a
<DRM Feature Representation>
instance and a
<DRM Geometry Hierarchy> instance
indicates that the environmental object(s) that they
represent have the semantic relationship indicated by
the <DRM Base Association Data>
instance on the association relationship.
4
An association between two
<DRM Geometry Hierarchy> instances
indicates that the environmental object(s) that they
represent have the semantic relationship indicated by
the <DRM Base Association Data>
instance on the association relationship.
5
An association from a
<DRM Hierarchy Summary Item>
instance to a <DRM Geometry Hierarchy>
indicates that the
<DRM Hierarchy Summary Item>
instance
summarizes that <DRM Geometry Hierarchy>
instance.
6
An association from a
<DRM Reference Surface> instance to a
<DRM Geometry Hierarchy>
instance indicates
that the <DRM Geometry Hierarchy>
instance
organizes the geometric objects that specify the resolution
surface of the <DRM Reference Surface>
instance.
7
In the case where multiple
<DRM Collision Volume> components are
specified for a given
<DRM Aggregate Geometry>
instance, the union
of the volumes thus specified is used in collision detection.
|
|
Class diagram
|
Figure 6.332 —
DRM_Time_Related_Geometry
|
|
Inherited field elements
|
|
|
Field elements
|
|
Associated to (one-way) (inherited) |
|
Associated to (one-way) |
|
Associated by (one-way) (inherited) |
|
Associated by (one-way) |
|
Associated with (two-way) (inherited) |
|
Associated with (two-way) |
|
Composed of (two-way) (inherited) |
|
Composed of (two-way) |
|
Composed of (two-way metadata) (inherited) |
|
Composed of (two-way metadata) |
|
Component of (two-way) (inherited) |
- zero or more <DRM Alternate Hierarchy Related Geometry> instances, each with a <DRM Hierarchy Data> link object
- zero or more <DRM Animation Related Geometry> instances
- zero or more <DRM Classification Related Geometry> instances, each with a <DRM Classification Data> link object
- zero or one <DRM Environment Root> instance
- zero or one <DRM Geometry Model> instance
- zero or more <DRM LOD Related Geometry> instances, each with a <DRM Base LOD Data> link object
- zero or more <DRM Octant Related Geometry> instances, each with a <DRM Octant Data> link object
- zero or more <DRM Perimeter Related Geometry> instances, each with a <DRM Perimeter Data> link object
- zero or more <DRM Quadrant Related Geometry> instances, each with a <DRM Quadrant Data> link object
- zero or more <DRM Separating Plane Relations> instances, each with a <DRM Separating Plane Data> link object
- zero or more <DRM Spatial Index Related Geometry> instances, each with a <DRM Spatial Index Data> link object
- zero or more <DRM State Related Geometry> instances, each with a <DRM State Data> link object
- zero or more <DRM Time Related Geometry> instances, each with a <DRM Time Constraints Data> link object
- zero or more <DRM Union Of Geometry Hierarchy> instances
|
Component of (two-way) |
|
|
Constraints
|
|
|
Example(s)
|
Consider atmospheric forecast data organized using nested
<DRM Time Related Geometry>
instances as shown in Figure 6.333.
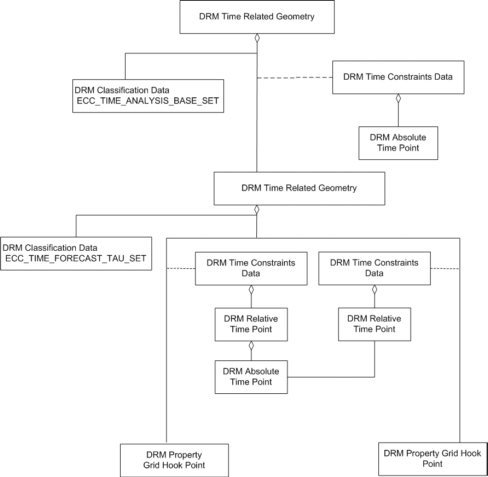
Figure 6.333 — <DRM Time Related Geometry> example
The <DRM Classification Data>
instances specify
to what each <DRM Time Related Geometry>
instance corresponds. The outer <DRM
Time Related Geometry> instance corresponds to base forecast times, while
the inner <DRM Time Related Geometry>
instance
corresponds to forecast taus.
In the forecast world, models are run starting at some base starting time (for example, at 0Z and 12Z). The model then produces forecasts at
several deltas after the base starting time (for example, at 6, 12,
18, and 24 hours). These are known as forecast taus.
Consequently, when forecast models are run at 0Z and 12Z, and each produces
a 24-hour forecast, the following overlap is obtained.
16 Nov 17 Nov 18 Nov
0Z +6 +12 +18 +24
12Z +6 +12 +18 +24
0Z +6 +12 +18 +24
etc.
To uniquely identify a forecast, the base forecast time and the
delta (tau) are required. Nested
<DRM Time Related Geometry> are used
in this example; one <DRM
Time Related Geometry> defines the base forecast time, while its
component <DRM Time Related Geometry> defines
the forecast tau.
This approach is needed only if multiple forecasts with
overlapping forecasts are included in the transmittal. If instead
the analysis (0Z) and +6 forecasts from each forecast are used,
the following would be obtained.
16 Nov 17 Nov
0Z +6 12Z +6 0Z +6 12Z +6 ...
Consider a <DRM Model> instance of a deciduous tree. The colour
of the tree’s leaves depends on the time of year, or season.
Consequently, a data provider might organize a tree <DRM
Model> instance using a <DRM
Time Related Geometry> instance along the lines depicted in
Figure
6.334. (Only the autumn
representation of the <DRM Model>
is shown, but other branches are present for the other seasons).
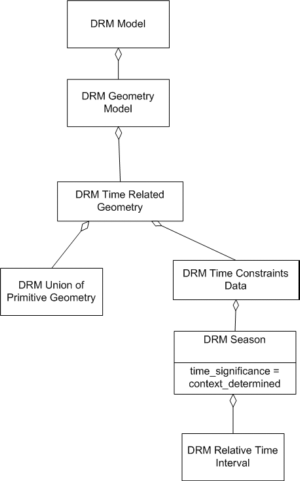
Figure 6.334 — <DRM Time Related Geometry> example
|